������ƪ��������[�Ї�Ļ���W]���������l����
�����ߌӽ����≦��ϴ�C�F��
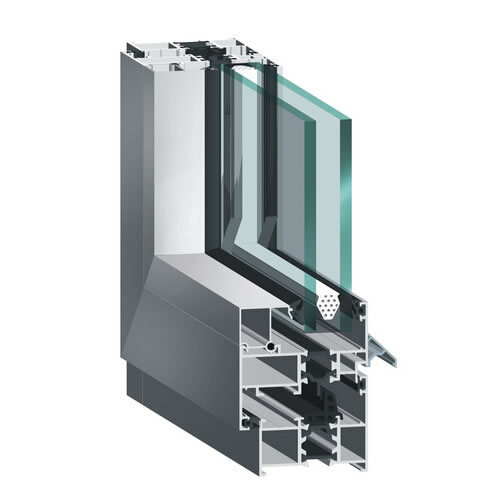
�����C���˹�������Ѹ�ٵ؏Ĺ��I�I���D�Ƶ������I�����ĝ����dz������܉����������S��Σ�U������Ⱦ�ĵط����؏ͻ��صĹ������������˻��������M���L�ڳ־õ��P�Ѻ�������\��؛�\��Ұ��I�ȣ��������g����ϴ�����w�к��Ļ�o���M�������(�����f��ϴ����)�ȵȡ�
�����ߌӽ����≦������ϴ�C���طN�C���˵�һ�N�����횾��ЃɷN���ܣ����ڱ����ϵ��������ܺ��Ƅӹ��ܣ����ڽ��������ķnj����ԣ���ϴ����C���˶����������ؓ���ɷN�����Y��������ؓ�������ֳɞ�������������L�ȡ���ձá��՚≺�s�C��ʹ���P�Ȯa��ؓ������������C���������ډ����ϡ��������ʽ�����ƄәC�����ֿɷ֞�����Ͷ����ɷN�Y���������P�����������C���˿Ɍ��FС�ͻ����p�������ҽY�����Σ����ڿ��ƣ������P�_ʽ�������ЙC���˵����������ɿ���
������ʮ����������Ƴɹ������M�ͱ���C���ˣ�����ֱ���Cԭ���������������a���ĸ��ٚ������әC�������ϸ����Ƅӣ����������a���������c�����s��20�Ƚǣ�ʼ�K��ָ�����������Ķ����F�C���˵��������ܣ�ʹ�C���˿��Ԍ��F�o�N�����Ƅӣ���һ����Խ��������
����Ŀǰ���Ј���ĸߌӽ��������C߀�����N��
�����ձ�BE��˾���Ƴɹ���һ�N�̶�܉��ʽȫ�ԄӲ����C���ˣ������b�ژ�픵�܉��������ϵ�yʹ�����C���ʴ��ڣ��ع̶����b�ڽ�������挧�۴�ֱ�����Ƅ��M���Ԅ���ϴ��
�����������պ����W�c�����F·�ֺ������ƵIJ����әC���а˂����P�����á�ʮ�������ʽ�Y�����������b�ã����Ӄɿ���������\���Ԍ��F����C�����ڹ̶���������X��Y�����Ƅӡ�
�����Ϻ��Ƽ���W�C�����о������Ƶ��p��ʽ���ڙC���ˣ��c����ʽ����C���˱��^���Y���^�麆�Σ�ʡ��ϥ�P����ͨ�^�_��ăAб�͈AҎ�_���_�]�m���Y�����������ɷ�Խһ�����_�A�����T�����s�h�������m���ԡ������I���I��W�C�����о������Ƴɹ�����ϴ�ߌӽ����ɴu���������Ļ���ı�����ϴ���ڙC���ˡ�ԓ�C����������ʽ��ؓ���������Ƅӷ�ʽ��݆ʽ���Ƅ��ٶȞ�1-8��/�֡������о��b�أ�Ӌ��C���ơ��������ڡ����ԇ�N���_����ӳ�^�á�
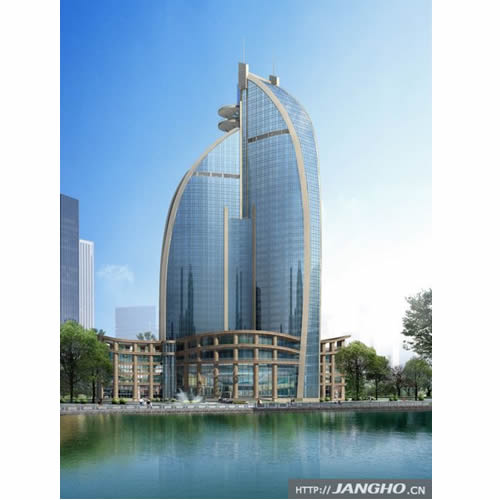
�����S������M���������c�Ƽ��İlչ������ҎģԽ��Խ����Խ��Խ�ߣ�����Ħ���B�ȱȽ��ǡ��ߌӽ������dz���һ��������ò�ĺ��ă��ݣ������ɴˌ��µij��������}Ҳ��څ���أ��������ڹ��I���У��@�N���}����ͻ�����n�����´�ǣ����ö�ã������ɞ�Ұ�һƬ������Ӱ��˳��е���ò����˞��˱������õij��������иߌӽ�������ϴ�����ڸ����������������ʡ���ȇ��H�Դ����ѽ��ɞ�ֱ��Ӱ푳�������Ć��}��
�����ߌӽ������ڸ߿����I���o��ϴ���������˘O��IJ����㡣Ŀǰ���҇�������ߌӽ�����ϴ����߀����������ɣ��@���ϴ������Ҫ�ɹ��˴�˵��@�M�и߿����I����ɣ����˵ĭh�����ӣ�����һ����Σ�U�ԣ�����Ч�ʵͣ��ɱ��ߣ��ĕr�L���S���C���˼��g�ij��F�Ͱlչ�Լ��˂����ұ��o���R���������˂�����ϣ�����ÙC���˴������M���@Щ�߿OΣ�U�����I���Ķ�����Đ��ӵĭh���ͷ��صĄڄ��н�Ó������
����ᘌ��@�N�N���}��������ϴ�C���ßo�˻���ϴ���Ԅ���ϴ���Ԅӹ�ˮ������ϴҺ����Ƭ�Cϵ�y���ƣ������ˆTֻ��ͨ�^�I�P���ɲٿv��ϴ�C��������������ϴ�^���У���ϴ�C�܉��Ԅ��M��߅���R�e���ɸ��������njӵľ��w��r�x���vϴ��Mϴ����ϴЧ���^�ߣ���ϴЧ�����ã��Ǹߌӽ���������坍���ߡ�ʹ�Ì���ߌӽ�������ϴ�ɱ������ƹ��˵Ąڄӭh������߄ڄ����a�ʣ������ஔ�����Ч�桢�������x�͏V韵đ���ǰ����